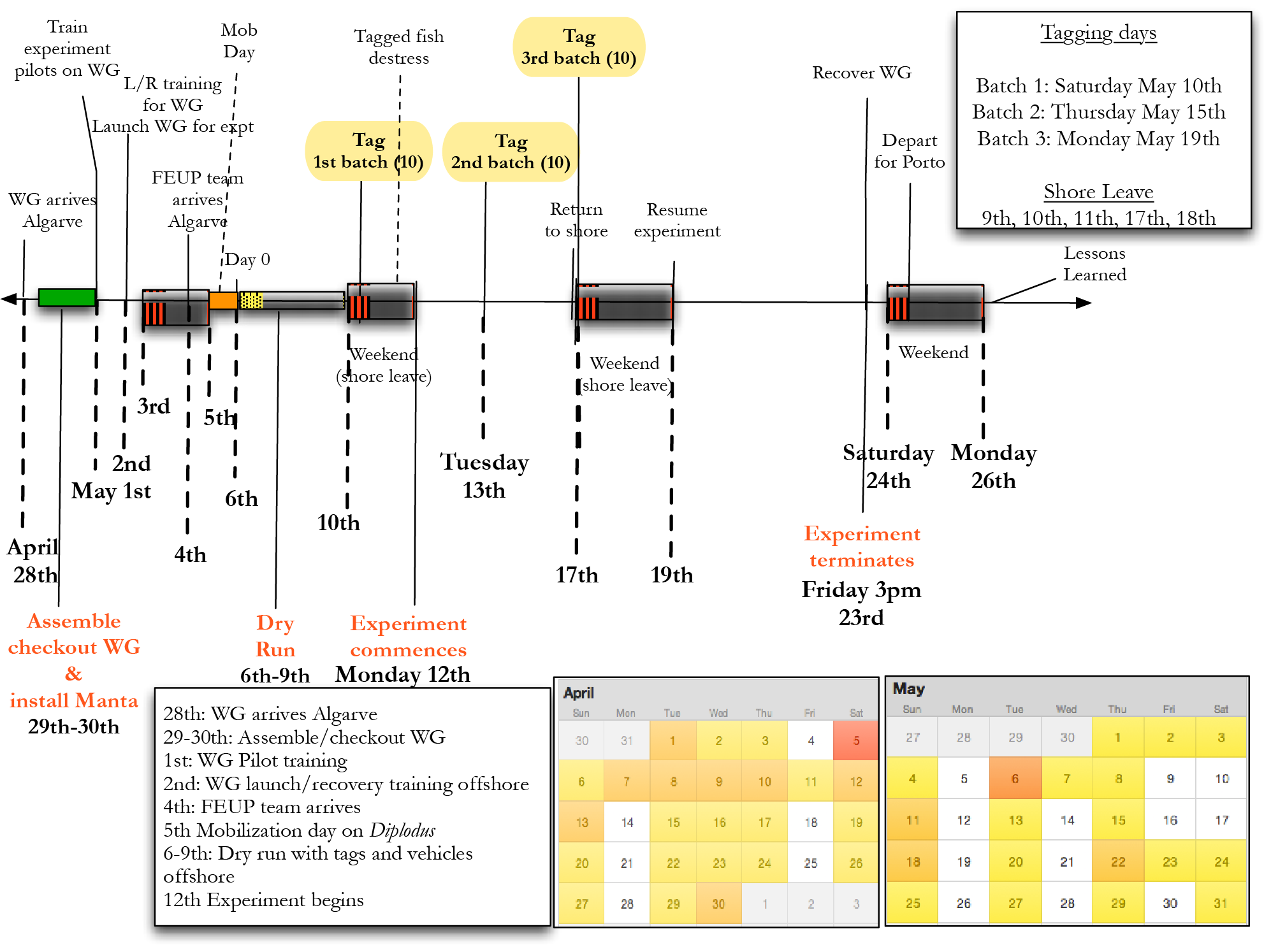
Cronograma
Comportamento dos diferentes veículos a seguir os peixes marcados.
Um UAV é utilizado para confirmar a localização do peixe. De seguida, o Wave Glider e um AUV são enviados para mapear a área e recolher dados.

Esta experiência tem como objetivo a recolha de dados sobre os hábitos do peixe-lua e o seu ambiente. A experiência resulta da colaboração entre a Faculdade de Engenharia da Universidade do Porto (FEUP) e o Centro de Investigação em Biodiversidade e Recursos Genéticos (CIBIO) da Universidade do Porto, e consiste no seguimento de vários peixes recorrendo a métodos e tecnologias inovadores.
Nesta Experiência, veículos aéreos, de superfície e subaquáticos autónomos irão seguir Mola mola (peixes-lua) identificados com marcadores, com o objectivo de obter dados da coluna de água através das plataformas robóticas e ao fazê-lo, os investigadores procuram compreender o contexto ambiental no qual estes peixes se movem. Dados anteriores mostram que estes peixes exibem movimentos de semelhantes a pesquisa em escalas mais amplas, e que, em escalas menores, os peixes-lua passam maiores períodos de tempo em áreas muito localizadas fazendo deslocações rápidas e rectas entre elas. Apesar de estas paragens durante movimentos de longa duração serem consistentes com a procura e exploração de fontes alimentares, o próximo passo necessário será o de tentar ligar os hábitos alimentares dos peixes identificados e o seu ambiente imediato. Dados desta experiência poderão vir a fornecer nova informação que permite examinar de que forma um predador responde às alterações no seu espaço ambiental e contribuir para uma melhor compreensão das alterações do nosso oceano.


A experiência fará novas contribuições nas áreas de tecnologia dos identificadores, operações em rede e autonomia de veículos em condições reais no mar. Os identificadores transportam um módulo de comunicação por satélite comercial que fornecerá a localização exacta dos peixes quando os identificadores (e peixes) estiverem à superfície. Os identificadores foram testados numa câmara hiperbárica para assegurar que resistem até 500 metro de profundidade. Uma vez identificados, ao largo da costa de Olhão, no Sul de Portugal, os peixes serão libertados. Como o seu comportamento não é exacto, veículo aéreos autónomos irão percorrer a costa oceânica em busca do envio do sinal dos identificadores à superfície e recolher imagens vídeo a uma altura segura que serão enviadas para um centro de comando num navio de pesquisa.
Operadores humanos irão autenticar as imagens recolhidas dos peixes identificados e posteriormente enviar uma expedição de veículos de superfície e subaquáticos completamente autónomos. Por sua vez estes veículos irão circum-navegar em torno dos peixes a uma distância de 700 metros, seguindo os peixes enquanto estes se movem e recolhendo dados contextuais. Estes dados serão enviados para uma plataforma de superfície que funcionará como um transportador de dados de forma a trazer esta informação para o navio de apoio, parado bem longe da localização dos peixes. Pesquisas repetidas e o seguimento de diferentes peixes serão tentadas de forma a demostrar a resposta e escala da rede arquitectada, autonomia deliberativa e ciência de oportunidade localizada.

