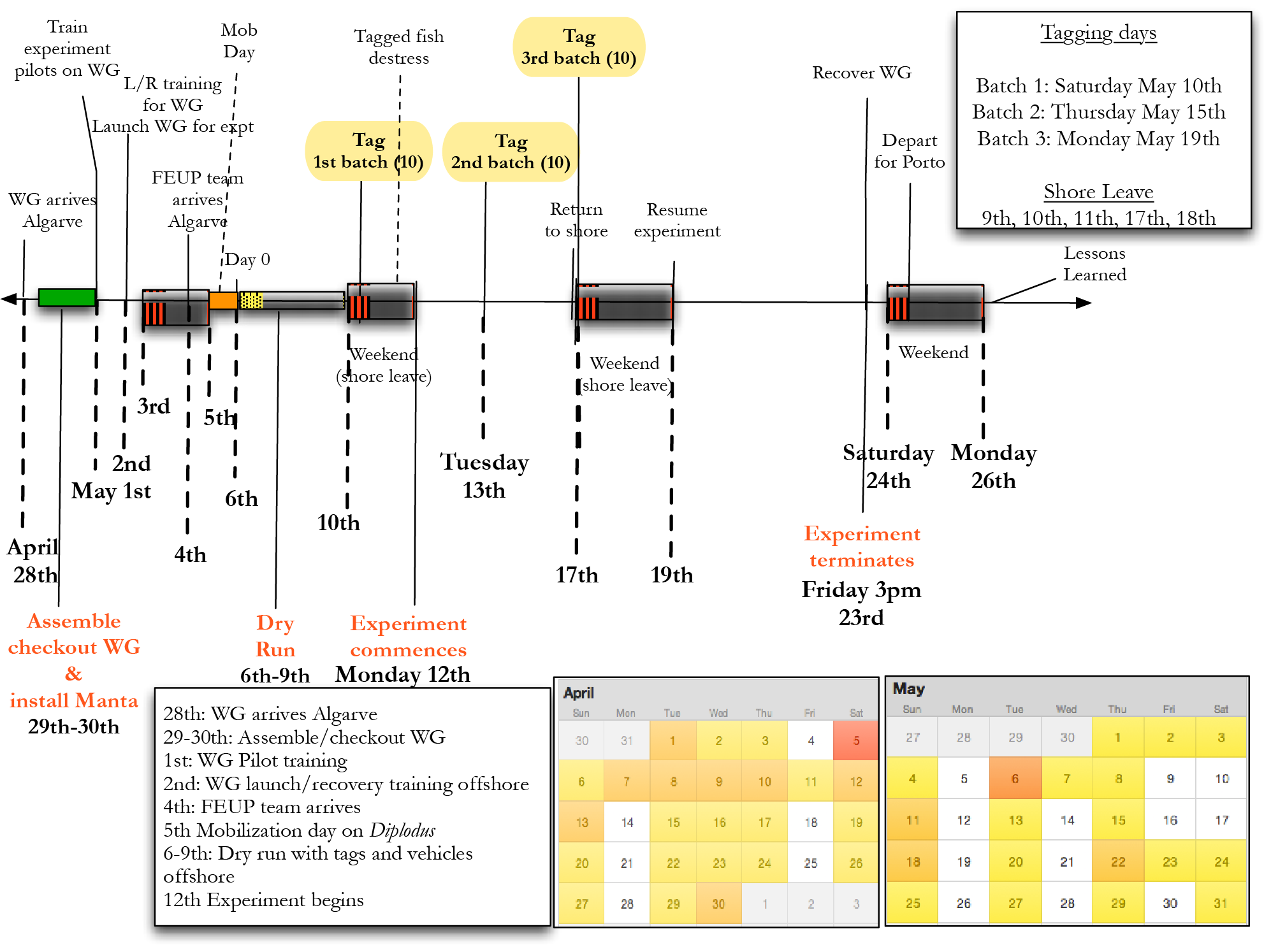
Timeline
The behavior of different vehicles tracking tagged fish.
A UAV is used to confirm the fish location. Afterwards, the Wave Glider and a AUV are sent to survey the area and gather data.

This experiment aims at collecting data about the sunfish habits and its habitat. The experiment is a joint effort by Faculty of Engineering University of Porto (FEUP) and Research Center in Biodiversity and Genetic Resources (CIBIO) , University of Porto, and consists on tracking several fish, using innovative methods and technologies.
Autonomous aerial, surface and underwater vehicles will track tagged Mola-Mola (Sunfish) with the objective of tracking them and obtaining data from the robotic platforms. In so doing researchers hope to understand the environmental context in which the fish operate. Previous data has shown that these fish exhibit large spatial variability and have shown temporal variability in sunning themselves on the sea surface. Why and under what conditions they exhibit such behaviors is unknown; data from this experiment will attempt their free-living behavior and contribute to the knowledge of our changing ocean.


This experiment will make novel contributions in tagging technology, distributed networked operations and autonomy in real world conditions at sea. The fish tags carry commercial grade satellite communications module that provide precise location of the fish when the tag (and fish) is at surface. The tags have been tested in a hyperbaric chamber to assure they can withstand up to 500 meters of depth. Once tagged off the coast of Olhão, in southern Portugal, the fish are released. Since their behaviour is not deterministic, autonomous aerial vehicles will search the coastal ocean for fish tags broadcasting their presence on the surface and take video images at a safe altitude transmitted to a command center on a research vessel.
Human operators will authenticate the fish with images and data and then dispatch fully autonomous surface and underwater vehicles. These vehicles in turn will circumnavigate around the fish at distances of over 700 meters following the fish while it is in motion and contextually recording data. Such data is 'dumped' to a surface platform which acts as a 'data mule' to bring the data to the research vessel parked well away from the fish's location. Repeated surveys and tracking different fish will be attempted to demonstrate the responsiveness and scalability of the networked architecture, deliberative autonomy and targeted opportunistic science.

